– Получается, что при наличии
на станции такого помощника
космонавту можно уже не выхо-
дить в открытый космос, так как
робот все за него сделает?
– Если мы говорим о штатных
работах, то да, действительно,
космонавтов этот робот разгру-
зит значительно. Но если речь
идет о каких-то внештатных
ситуациях, то тут космонавту
нет равных. Человек действует
намного быстрее, точнее и лов-
чее, чем машина. Для приня-
тия решений на месте нужен
человеческий интеллект. Наш
робот примитивный, в сравне-
нии с человеком – очень мед-
ленный. На всех видеороликах
мы демонстрируем его работу
в ускоренном воспроизведе-
нии. Ведь медленный робот бо-
лее безопасный. Он – черепаха,
которая обогнала зайца.
– Робот уже применялся в космосе?
– Нет, мы в самом начале пути.
Идем от простого к сложному.
Каждый этап нашей работы
приближает нас к созданию со-
вершенной машины. Сначала
мы создали имитатор полезного
груза. На нем отрабатываем тех-
нологические операции. Из это-
го аппарата постепенно и раз-
вился наш косморобот.
На сегодняшний день наша за-
дача – провести два важнейших
эксперимента. Первый экспери-
мент – «Контур-2», его цель – от-
работка управления с бортаМКС
роботом, который в это время
находится на Земле. В рамках
эксперимента «Захват-М» пла-
нируется на внешнюю поверх-
ность космической станции
вынести манипулятор, анало-
гичный тому, который исполь-
зуется в роботе. Манипулятор
будет проходить испытания.
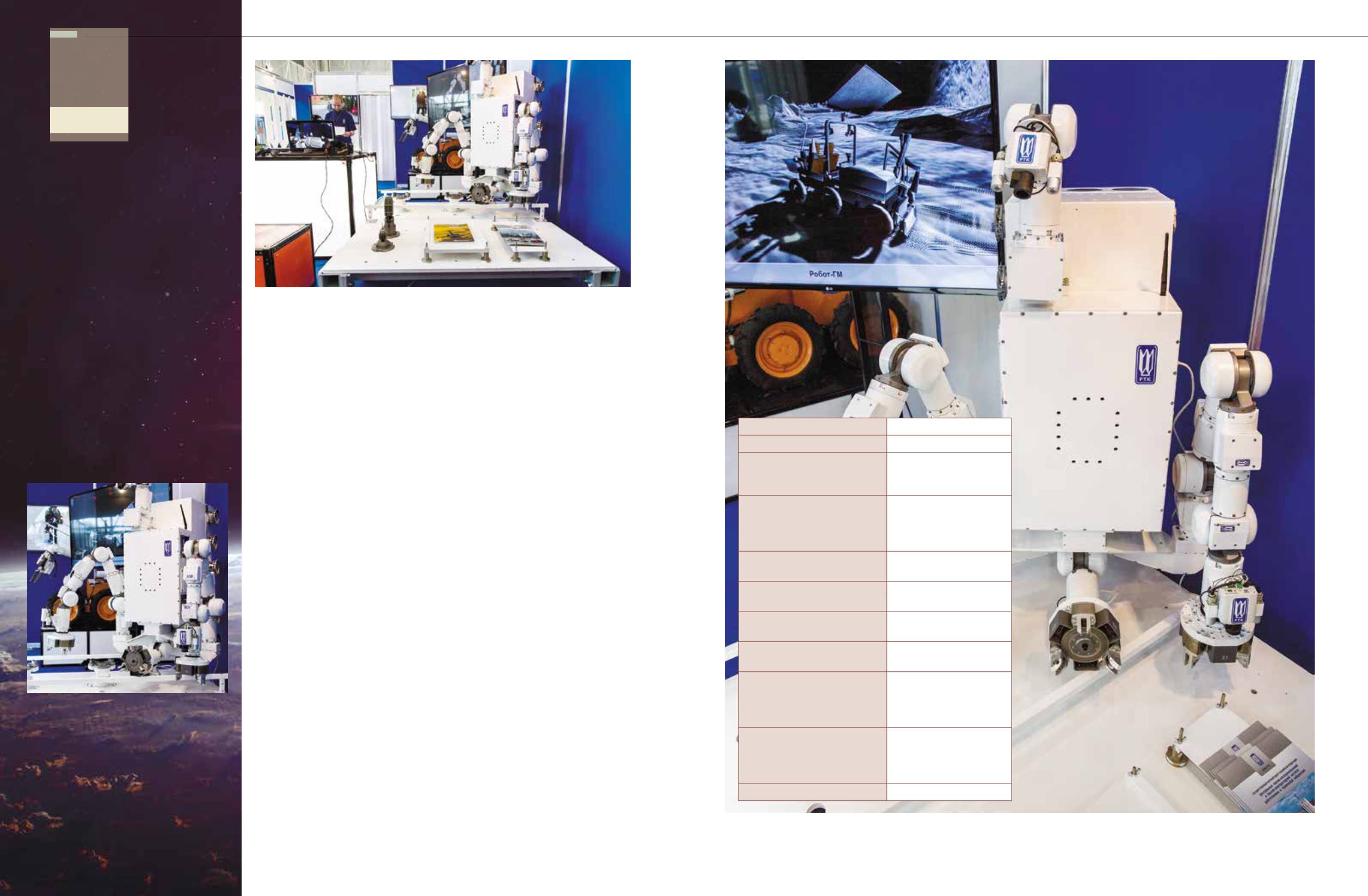
Робот, представленный на на-
шем стенде в рамках форума
«Армия-2016», – это макет, сде-
ланный в 2015 году. Также мы
создали стенд обезвешивания.
У нас есть имитатор поверхно-
сти станции, есть робот – раз-
грузочная машина. На стен-
де, способном обезвешивать
200 килограммов на плоско-
сти, наш робот плавает как бы
в невесомости. В институте
на этом стенде мы отрабатыва-
ем технологические элементы
работы на космической стан-
ции.
– Есть ли уже заказы на вашего ро-
бота?
– Согласно условиям тендера
на создание косморобота, про-
веденного «Роскосмосом», го-
ловной организацией по про-
екту назначена РКК «Энергия».
Ей поручено создание косми-
ческой транспортной системы.
ГНЦ ЦНИИ РТК сосредоточится
на создании мобильного робо-
та – самой главной части этой
системы.
1.
Передвижение по такелажным
элементам (точкам фиксации)
космического аппарата
2.
Перемещение, монтаж и демон-
таж полезного груза (научной
аппаратуры и служебного оборудова-
ния)
3.
Стыковка и расстыковка электро-
соединений
4.
Визуальная инспекция внешней
поверхности космического аппа-
рата с помощью телекамер
5.
Инспекция внешней поверхности
космического аппарата с помо-
щью сменного инструмента (измере-
ние температуры наружных элементов,
измерение уровня радиации и т. д.)
6.
Поддержка операций внекора-
бельной деятельности космонав-
тов: подсветка рабочей области; пере-
нос полезного груза и инструментов в
рабочую зону оператора; обеспечение
фиксации и ориентирования техно-
логического оборудования на время
выполнения операции
задач
косморобота
ВЫСТАВКА
102
103
Воздушно-космическая сфера №3/4(88/89) декабрь 2016
ОСНОВНЫЕ ТЕХНИЧЕСКИЕ
ХАРАКТЕРИСТИКИ КОСМОРОБОТА
Количество шарниров
19 шт.
Напряжение питания
23-29 В
Максимальная потребляе-
мая мощность в режиме
движения
140 Вт
Максимальная потребляе-
мая мощность при выпол-
нении технологических
операций
600 Вт
Потребляемая мощность в
режиме хранения
100 Вт
Электропитание
автономное; подзаряд
от бортовой батареи
Емкость автономного
источника питания
4000 (150) Вт*ч (А*ч)
Габариты в транспортном
положении
500х500х1200 мм
Максимальное допустимое
расстояние между точками
фиксации на космическом
аппарате
1,5 м
Максимальная дальность
выполнения операций:
инспекционных/манипуля-
ционных
3/1,6 м
Масса
180 кг


